
Article
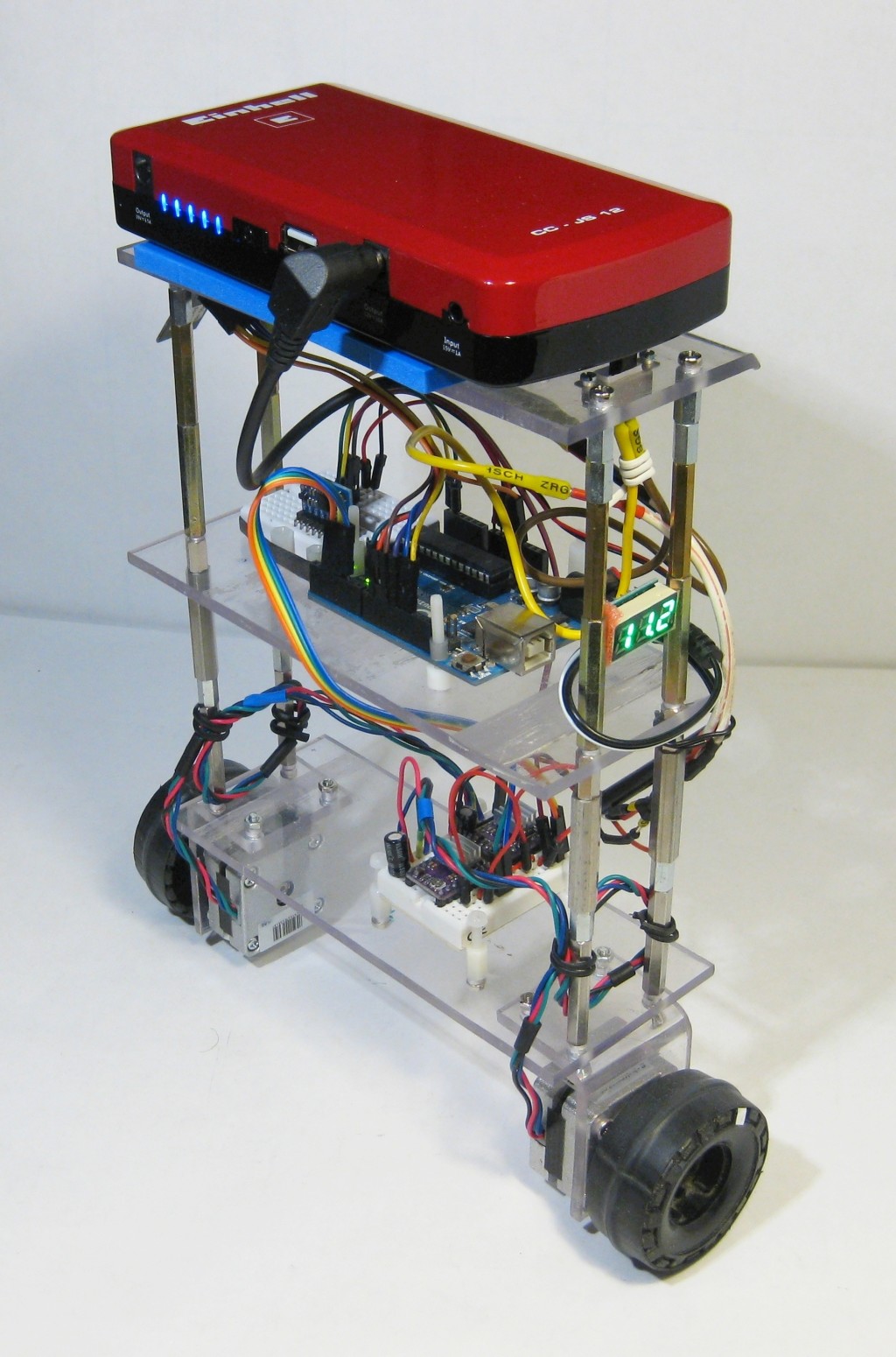
BalBot: a Self-Balancing Robot
Modern acceleration sensors ease the construction process
Components
The BOM (Bill of Materials) is the technically exhaustive listing of parts and other hardware items used to produce the working and tested prototype of any Elektor Labs project. The BOM file contains deeper information than the Component List published for the same project in Elektor Magazine. If required the BOM gets updated directly by our lab engineers. As a reader, you can download the list here.
Want to learn more about our BOM list? Read the BOM list article for extra information.
Component list
Component List
Arduino Uno
L298 Motor driver (or module)
MPU6050
2 DC motors, e.g. PGM37DC12 or similar
Batteries (7 pcs NiMH or 2 pcs LiPo)
2-amp fuse
If applicable: power supply switch
Discussion (0 comments)