Inspired by NASA’s Mars rovers Curiosity and Perseverance, the M.A.R.S. rover from 4tronix is an autonomous vehicle designed to drive around on rough terrain. In this video we build and try out the Raspberry Pi Zero version of the rover robot.
Inspired by NASA’s Mars rovers Curiosity and Perseverance, the M.A.R.S. Rover from 4tronix is an autonomous vehicle designed to drive around on rough terrain, but on Earth. Indeed, in this case, M.A.R.S. does not refer to the planet; it is an acronym for Mobile Autonomous Robotic System. The innovative kit of parts does not require any soldering.
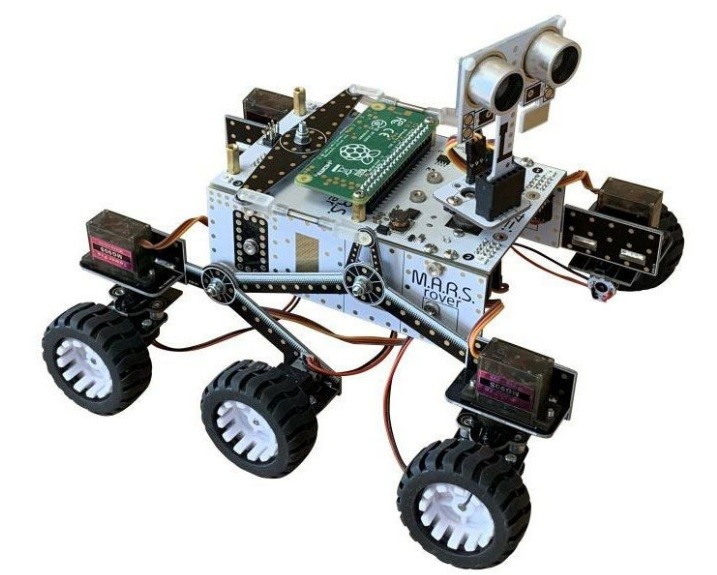
4tronix M.A.R.S. Rover Robot Kit for Raspberry Pi Zero
There are two versions of the kit: Raspberry Pi Zero and BBC micro:bit. In the Elektor TV video below, we build the Raspberry Pi version. Note that the Raspberry Pi Zero or BBC micro:bit aren't included, and neither are the required four AA batteries. For the Raspberry Pi, you will also need a microSD card. The kit does include tools though. Watch the video to see how we built and tried out the Raspberry Pi Zero (2 W) version of the kit.
M.A.R.S. Rover Kit Details
The 4tronix Mobile Autonomous Robotic System (M.A.R.S.) Rover is based loosely on the well-known NASA/JPL Curiosity and Mars 2020 rovers. The compact design uses the same sort of rocker arms, bogies, and differential arm mechanism.
A Raspberry Pi Zero and four rechargeable AA batteries are required for operation. The kit features the following:
Six motors: 80 rpm 6 V, N20 micro gear motors
Four Servos: MG90S metal gear analog micro servos
Four FireLEDs
An ultrasonic distance sensor on steerable mast
30 special PCBs
11 different PCB designs
Length = 200 mm
Width = 185 mm
Height with Mast = 170 mm
Weight, excluding the Raspberry Pi Zero and batteries = 460 g
A Makecode extension simplifies unit control. A Python library module is available for the Raspberry Pi Zero.

Discussion (0 comments)