
HAL? What are you doing with my spanner?
January 07, 2019
on
on
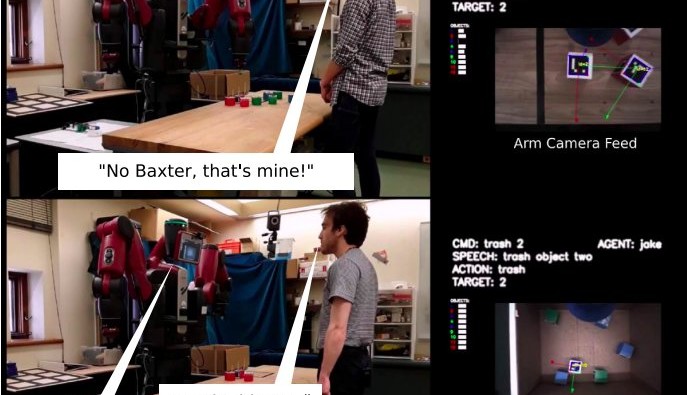
A research team from Yale University has developed a behaviour model for robotic system that is able to ascertain ownership of property and social norms to help facilitate interaction in human social environments.
Futurologists predict that robots will need to communicate effectively and appropriately with us in social settings. A key aspect of successful human interaction is understanding and behaving according to mutually agreed ‘rules’ that we follow with the goal of promoting a well-functioning society. Respect for ownership of property helps to facilitate social interaction in a way that is considerate of others. Such standards in robots could improve their interactions with humans so that they are able to differentiate between their own tools and those of others.
In the approach developed by Scassellati, Xuan Tan and Jake Brawer, ownership is presented as a diagram of probabilistic relationships between objects and their owners. This is combined with a database of predicate-based norms that restrict the actions the robot is allowed to perform on its own objects.
One of the challenges is that some of the methods of ascertaing ownership arise through receiving explicit prompts (e.g. "Don’t take my tools") and others are learned through experience. According to Scassellati, combining these two ways of learning is easy for humans, but much more difficult for robots.
The system developed by the researchers combines a new incremental norm-learning algorithm that enables both one-time learning and induction from examples, with Bayesian derivation of ownership relationships in response to obvious rule violations and perceptual prediction of the likely owners of an object. Taken together, these components allow the system to learn the property norms and relationships that are applicable in a variety of situations.
Futurologists predict that robots will need to communicate effectively and appropriately with us in social settings. A key aspect of successful human interaction is understanding and behaving according to mutually agreed ‘rules’ that we follow with the goal of promoting a well-functioning society. Respect for ownership of property helps to facilitate social interaction in a way that is considerate of others. Such standards in robots could improve their interactions with humans so that they are able to differentiate between their own tools and those of others.
In the approach developed by Scassellati, Xuan Tan and Jake Brawer, ownership is presented as a diagram of probabilistic relationships between objects and their owners. This is combined with a database of predicate-based norms that restrict the actions the robot is allowed to perform on its own objects.
One of the challenges is that some of the methods of ascertaing ownership arise through receiving explicit prompts (e.g. "Don’t take my tools") and others are learned through experience. According to Scassellati, combining these two ways of learning is easy for humans, but much more difficult for robots.
The system developed by the researchers combines a new incremental norm-learning algorithm that enables both one-time learning and induction from examples, with Bayesian derivation of ownership relationships in response to obvious rule violations and perceptual prediction of the likely owners of an object. Taken together, these components allow the system to learn the property norms and relationships that are applicable in a variety of situations.
Read full article
Hide full article
Discussion (0 comments)