

Walking Bug
A robot with servo-powered legs
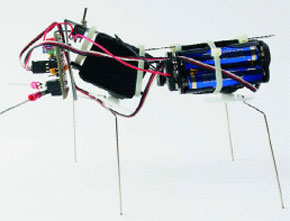
Making a robot walk instead of drive around on wheels can be a daunting task. The author of this Walking Bug came up with a remarkably simple solution. Although our robot does not stand upright on two legs, it can actually walk using just two servos and a minimumamount of electronics. The power of the design is, of course, found in the combination of these two elements. The servos make the ‘natural’ movement needed here: just back and forth. As an advantage over other actuators, they can be directly driven by a microcontroller, which saves us a lot of driver and interfacing electronics. The mechanical construction of the Walking Bug is also relatively simple, the ‘legs’ being secured directly to the servo spindles.
This is a MEMBER ONLY article. You need a subscription to read this article.
- Unlimited access to online Member Only articles
- 3 new editions Elektor Magazine (digital)
- More than 5000 Gerber files
- 20% member discount on e-books (at elektor.com)
- 10% member discount on Products (at elektor.com)
Available from €5.33 per month.
What is Members Only
Elektor is committed to providing high-quality content on electronics, catering to tens of thousands of paying members. As part of this commitment, Elektor has launched Premium, an initiative that offers exclusive online articles to members sometimes even before they appear in the magazine.
Every day, members can access in-depth articles that showcase the best of Elektor's premium content.
This initiative aims to reward members with early access. Once logged in, members can easily enjoy this exclusive content and engage in discussions about featured projects. While Premium adds to the existing resources available, Elektor will continue to provide a wealth of free information.
Join the Elektor community today to take advantage of Premium and other benefits!
Materials
Gerber file
CAM/CAD data for the PCB referred to in this article is available as a Gerber file. Elektor GREEN and GOLD members can exclusively download these files for free as part of their membership. Gerber files allow a PCB to be produced on an appropriate device available locally, or through an online PCB manufacturing service.
Elektor recommends the Elektor PCB Service service from its business partner Eurocircuits or AISLER as the best services for its own prototypes and volume production.
The use of our Gerber files is provided under a modified Creative Commons license. Creative Commons offers authors, scientists, educators and other creatives the freedom to handle their copyright in a more free way without losing their ownership.
Component list
R1 = 10kOhm
R2,R3 = 1kOhm5
Capacitors:
C1,C3,C4 = 100nF
C2 = 10µ F 16V radial
Semiconductors:
D1, D2 = LED, low-current, 3mm
IC1 = AT90S2313-10PI
Miscellaneous:
X1 = 4MHz ceramic resonator
K2 = 5-way SIL pinheader
K3,K4 = 3-way SIL pinheader
S1, S2 = miniature microswitch, (e.g., MBF5B, Conrad Electronics # 704571)
2 servos
2 battery holders for 2 AAA batteries
PCB, ref. 040071-1
Discussion (0 comments)