

The shimmy of the centipede
August 30, 2016
on
on
Summer is the best season for the observation of insects and other creepy-crawlies; one has to admire their tenacity, their ingenuity, their speed and their precision. Take the centipede that jumps out when you lift a stone… it’s very fast, so fast that you don’t have time to wonder if its speed is because of the number of its legs.
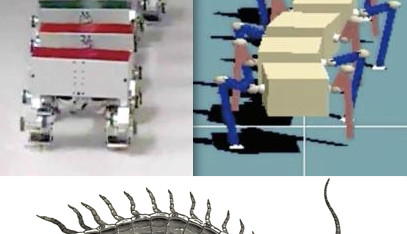
The undulating movement of their bodies fascinates everyone. To understand how that works, there are some mysteries to uncover. And that’s what some researchers at the university of Kyoto (Japan) are doing with simulations and then robot centipedes. The Japanese researchers found to their surprise that the secret of the movement of centipedes lies in the control of instability. Centipedes propel themselves by moving their many legs in a wave movement (also known as a ‘shimmy’) which produce forces of acceleration and deceleration. In fact, because of their proximity to the ground, the movement of their legs is limited and their margin of manoeuvrability is reduced. To get around these restrictions, the animal undulates the segments of its body in a motion that controls a state of instability.
The mathematical model of this biological mechanism, where undulations result from instability, is termed a Supercritical Hopf Bifurcation. Thanks to which the researchers have been able to reproduce this undulating locomotion with multi-ped segmented robots.
The study of human and animal locomotion plays an essential role in the evolution of robotics. This study throws new light on some obscure areas of animal movement. It passes the strict bounds of biology, because a better understanding will allow us to answer the question of the optimal number of legs for this or that type of robot.
The undulating movement of their bodies fascinates everyone. To understand how that works, there are some mysteries to uncover. And that’s what some researchers at the university of Kyoto (Japan) are doing with simulations and then robot centipedes. The Japanese researchers found to their surprise that the secret of the movement of centipedes lies in the control of instability. Centipedes propel themselves by moving their many legs in a wave movement (also known as a ‘shimmy’) which produce forces of acceleration and deceleration. In fact, because of their proximity to the ground, the movement of their legs is limited and their margin of manoeuvrability is reduced. To get around these restrictions, the animal undulates the segments of its body in a motion that controls a state of instability.
The mathematical model of this biological mechanism, where undulations result from instability, is termed a Supercritical Hopf Bifurcation. Thanks to which the researchers have been able to reproduce this undulating locomotion with multi-ped segmented robots.
The study of human and animal locomotion plays an essential role in the evolution of robotics. This study throws new light on some obscure areas of animal movement. It passes the strict bounds of biology, because a better understanding will allow us to answer the question of the optimal number of legs for this or that type of robot.
Read full article
Hide full article
Discussion (0 comments)