

YDLidar X4: A Low-Cost Solution that Sees 360º
Hardware
The range of the YDLidar X4 is indicated as from 12 cm to “minimal 10 m” around 360 degrees. At distance less than 2 m the resolution in better than 0.5 mm. At distances greater than 2 m the resolution is better than 1% of the measured distance. The accuracy of the angle at which the object has been detected is 0.5 degrees, at a scan frequency of 7 Hz.
An stable power supply voltage is very important, because this directly affects the performance. The datasheet states that the circuit will operate with up to a maximum power supply ripple of 100 mV, but it is better to limit voltage fluctuations to 50 mV or less.
YDLidar X4 in practice
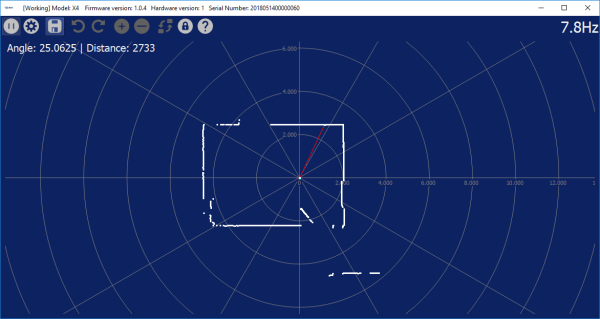
In practice the YDLidar X4 works quite well right away with Windows 7 (64-bit). The drivers for the USB interface board are easy to install and the control/interface program (“PointCloudViewer_V02R02.exe”) works quite straightforward. Perhaps a little too straightforward, but for a demo it is perfect.
After starting the PointCloudViewer program you are asked for the COM port and which Lidar variant you have connected. At top right, using the small flag, you can set the interface language for the software (only after restarting the software is the new language selection effective). After confirmation the program begins.

The Lidar is started with the small ‘play’ symbol. Click on this and the head starts to rotate. A few points appear on the screen that represent the objects in the space. The side where the motor is mounted corresponds to the positive direction of the y-axis.
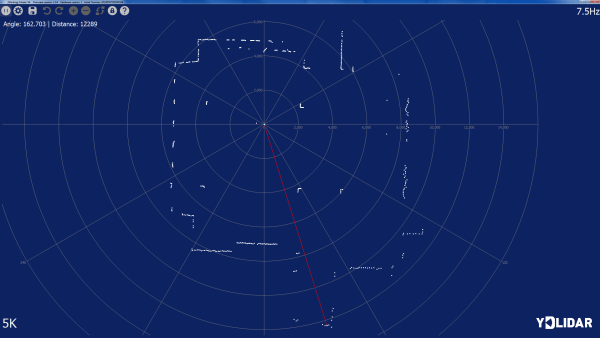
With the ‘save’ button you can export the current measurements as a text file, each value of angle and distance value is stored in the format of:
angle:xx.xx , distance:xxxx
A Solution for Robot Systems
From all this it appears that the YDLidar X4 is intended for the implementation of robot systems. The ROS and SDK packages clearly hint at this. A thorough knowledge of Linux and/or Visual Studio 2010 will be almost indispensable to be able to utilise the YDLidar X4 in a practical application. But that is something you were probably already counting on when getting involved with robotics. For a very reasonable amount of money, you will get a perfectly usable Lidar that will give your robot eyes in all directions and also comes with a big pile of software.
Read full article
Hide full article
Discussion (2 comments)
Mate 6 years ago
mathewood 4 years ago